
티스토리 뷰

#include <opencv2/highgui.hpp>
#include <opencv2/imgproc.hpp>
#include <opencv2/core.hpp>
#include <iostream>
using namespace std;
using namespace cv;
#define PI 3.1415926
int main() {
Mat input = imread("road.jpg", IMREAD_GRAYSCALE);
Mat contours;
vector<Vec4i> lines;
// applying canny algorithm
Canny(input, contours, 125, 350);
/************* Probabilistic hough transform *************/
HoughLinesP(contours, // InputArray
lines, // OutputArray
1, // rho
PI / 180, // theta (step size)
60, // threshold (minimum number of votes)
100, // minLength
20); // maxGap
Mat houghLinesP;
input.copyTo(houghLinesP);
// Draw the lines
Scalar color = Scalar(255, 255, 255);
vector<Vec4i>::const_iterator it = lines.begin();
while (it != lines.end()) {
Point pt1((*it)[0], (*it)[1]);
Point pt2((*it)[2], (*it)[3]);
line(houghLinesP, pt1, pt2, color);
++it;
}
imwrite("houghLinesP.bmp", houghLinesP);
/************* Fitting a line *************/
// black background
Mat oneline(contours.size(), CV_8U, Scalar(0));
// Select first line and draw white line
int n = 0;
line(oneline,
Point(lines[n][0], lines[n][1]),
Point(lines[n][2], lines[n][3]),
Scalar(255),
3); // line width
imwrite("[BeforeBitwise]online.bmp", oneline);
// contours AND white line
bitwise_and(contours, oneline, oneline); // src1, src2, dst
// insert into a vector<Point>
vector<Point> points;
// Iterate over the pixels to obtain all point positions
for (int y = 0; y < oneline.rows; y++) {
// row y
uchar* rowPtr = oneline.ptr<uchar>(y);
for (int x = 0; x < oneline.cols; x++) {
// column x
if (rowPtr[x]) { // if on a contour
points.push_back(Point(x, y));
}
}
}
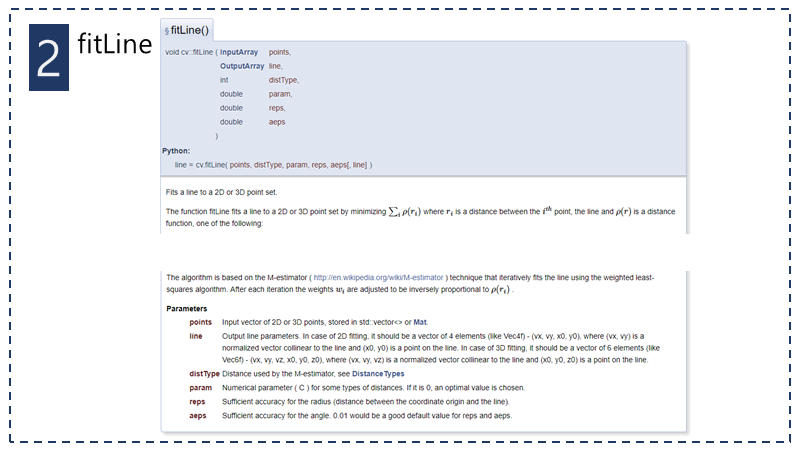
Vec4f line;
fitLine(points, line,
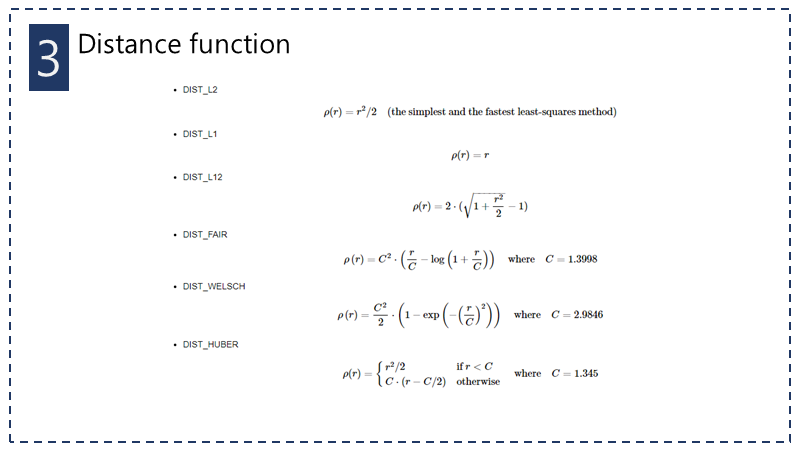
DIST_L2, // distance type
0, // not used with L2 distance
0.01, 0.01); // accuracy
int x0 = line[2]; // a point on the line
int y0 = line[3];
int x1 = x0 + 150 * line[0];
int y1 = y0 + 150 * line[1];
// draw the line
Mat result;
input.copyTo(result);
cv::line(result, Point(x0, y0), Point(x1, y1),
0, 2); // color and thickness
/************* Image writer *************/
imwrite("input.bmp", input);
imwrite("contours.bmp", contours);
imwrite("[AfterBitwise]online.bmp", oneline);
imwrite("Fitted line.bmp", result);
}'영상처리 > OpenCV' 카테고리의 다른 글
| 20. Hough Transform (0) | 2019.07.06 |
|---|---|
| 19. Canny operator (0) | 2019.06.12 |
| 18. Bilateral filter (0) | 2019.06.02 |
| 17. Maximally stable external regions (0) | 2019.06.02 |
| 16. watershed transformation (0) | 2019.05.28 |
댓글
공지사항
최근에 올라온 글
최근에 달린 댓글
- Total
- Today
- Yesterday
링크
TAG
- adaptive thresholding
- morphology
- pyrUp
- erosion
- equalizing
- dilation
- canny operator
- direction detection
- hough transform
- top hat
- black top hat
- segmentation
- canny
- Line Detection
- pyrDown
- upsampling
- median filter
- gradient
- Low pass filter
- laplacian of gaussian
- difference of gaussian
- Filter
- mean filter
- Sobel
- morphological operation
- 캐니 엣지
- bilateral filter
- OpenCV
- high pass filter
- 영상처리
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | ||
| 6 | 7 | 8 | 9 | 10 | 11 | 12 |
| 13 | 14 | 15 | 16 | 17 | 18 | 19 |
| 20 | 21 | 22 | 23 | 24 | 25 | 26 |
| 27 | 28 | 29 | 30 |
글 보관함