
티스토리 뷰


#include <iostream>
#include <opencv2/highgui.hpp>
#include <opencv2/imgproc.hpp>
#include <opencv2/core.hpp>
using namespace std;
using namespace cv;
#define PI 3.1415926
class EdgeDetector {
private:
// original image
Mat img;
// 16-bit signed int image
Mat sobel;
// Aperture size of the Sobel kernel
int aperture;
// Sobel magnitude
Mat sobelMagnitude;
// Sobel orientation
Mat sobelOrientation;
public:
EdgeDetector() : aperture(3) {}
// Set the aperture size of the kernel
void setAperture(int a) {
aperture = a;
}
// Get the aperture size of the kernel
int getAperture() const {
return aperture;
}
// Compute the Sobel
void computeSobel(const Mat& image) {
Mat sobelX;
Mat sobelY;
// Compute Sobel
Sobel(image, sobelX, CV_32F, 1, 0, aperture);
Sobel(image, sobelY, CV_32F, 0, 1, aperture);
imwrite("sobelX.bmp", sobelX);
imwrite("sobelY.bmp", sobelY);
// Compute magnitude and orientation
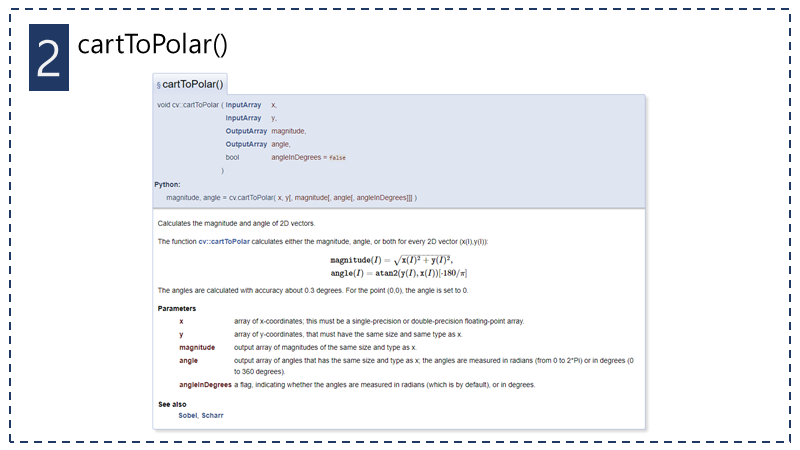
cartToPolar(sobelX, sobelY, sobelMagnitude, sobelOrientation);
}
// Compute the Sobel
void computeSobel(const Mat& image, Mat &sobelX, Mat &sobelY) {
// Compute Sobel
Sobel(image, sobelX, CV_32F, 1, 0, aperture);
Sobel(image, sobelY, CV_32F, 0, 1, aperture);
// Compute magnitude and orientation
cartToPolar(sobelX, sobelY, sobelMagnitude, sobelOrientation);
}
// Get Sobel magnitude
Mat getMagnitude() {
return sobelMagnitude;
}
// Get Sobel orientation
Mat getOrientation() {
return sobelOrientation;
}
// Get a thresholded binary map
Mat getBinaryMap(double threshold) {
Mat bin;
cv::threshold(sobelMagnitude, bin, threshold, 255, THRESH_BINARY_INV);
return bin;
}
// Get a CV_8U image of the Sobel
Mat getSobelImage() {
Mat bin;
double minval, maxval;
minMaxLoc(sobelMagnitude, &minval, &maxval);
sobelMagnitude.convertTo(bin, CV_8U, 255 / maxval);
return bin;
}
// Get a CV_8U image of the Sobel orientation
// 1 gray-level = 2 degrees
Mat getSobelOrientationImage() {
Mat bin;
sobelOrientation.convertTo(bin, CV_8U, 90 / PI);
return bin;
}
};
int main() {
Mat input_gray = imread("road.jpg", IMREAD_GRAYSCALE);
// Compute Sobel
EdgeDetector ed;
ed.computeSobel(input_gray);
// Apply canny algorithm
Mat Canny_contours;
Canny(input_gray, // gray-level image
Canny_contours, // output contours
125, // low threshold
350); // high threshold (255 * rootsquare(2) = 360.624..)
imwrite("road_gray.bmp", input_gray);
imwrite("Sobel_magnitude.bmp", ed.getMagnitude());
imwrite("Sobel_orientation.bmp", ed.getSobelOrientationImage());
imwrite("Sobel_low_threshold.bmp", ed.getBinaryMap(125));
imwrite("Sobel_high_threshold.bmp", ed.getBinaryMap(350));
imwrite("Canny_contours.bmp", 255 - Canny_contours);
}
'영상처리 > OpenCV' 카테고리의 다른 글
| 21.Line fitting (0) | 2019.07.08 |
|---|---|
| 20. Hough Transform (0) | 2019.07.06 |
| 18. Bilateral filter (0) | 2019.06.02 |
| 17. Maximally stable external regions (0) | 2019.06.02 |
| 16. watershed transformation (0) | 2019.05.28 |
댓글
공지사항
최근에 올라온 글
최근에 달린 댓글
- Total
- Today
- Yesterday
링크
TAG
- equalizing
- direction detection
- gradient
- morphology
- upsampling
- dilation
- Filter
- difference of gaussian
- pyrDown
- Low pass filter
- 영상처리
- bilateral filter
- hough transform
- laplacian of gaussian
- mean filter
- morphological operation
- OpenCV
- black top hat
- 캐니 엣지
- segmentation
- high pass filter
- canny
- adaptive thresholding
- Sobel
- median filter
- top hat
- erosion
- pyrUp
- canny operator
- Line Detection
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | ||||||
| 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| 9 | 10 | 11 | 12 | 13 | 14 | 15 |
| 16 | 17 | 18 | 19 | 20 | 21 | 22 |
| 23 | 24 | 25 | 26 | 27 | 28 |
글 보관함