
티스토리 뷰
이전까지 간단하게 openCV에서 이미지를 불러오고 pixel value에 접근하고 수정하는 법을 배웠는데, 앞으로 한동안 filter에 대해서 배워보고자 한다. (중간을 건너뛰는 이유는 단순하게 filter가 먼저 궁금해서이다.. 나중에 다시 다룰 기회가 있지 않을까 싶다.) 앞으로 문서로 남기는 것이 더 좋을 것 같아서 PPT로 요약 후 그 내용으로 대체하고자 한다. (+ 글이 많으면 읽기가 귀찮다. 한눈으로 볼 수 있게 노력할 예정... 블로그 글에는 약간의 코멘트는 더 추가할 생각이다.)





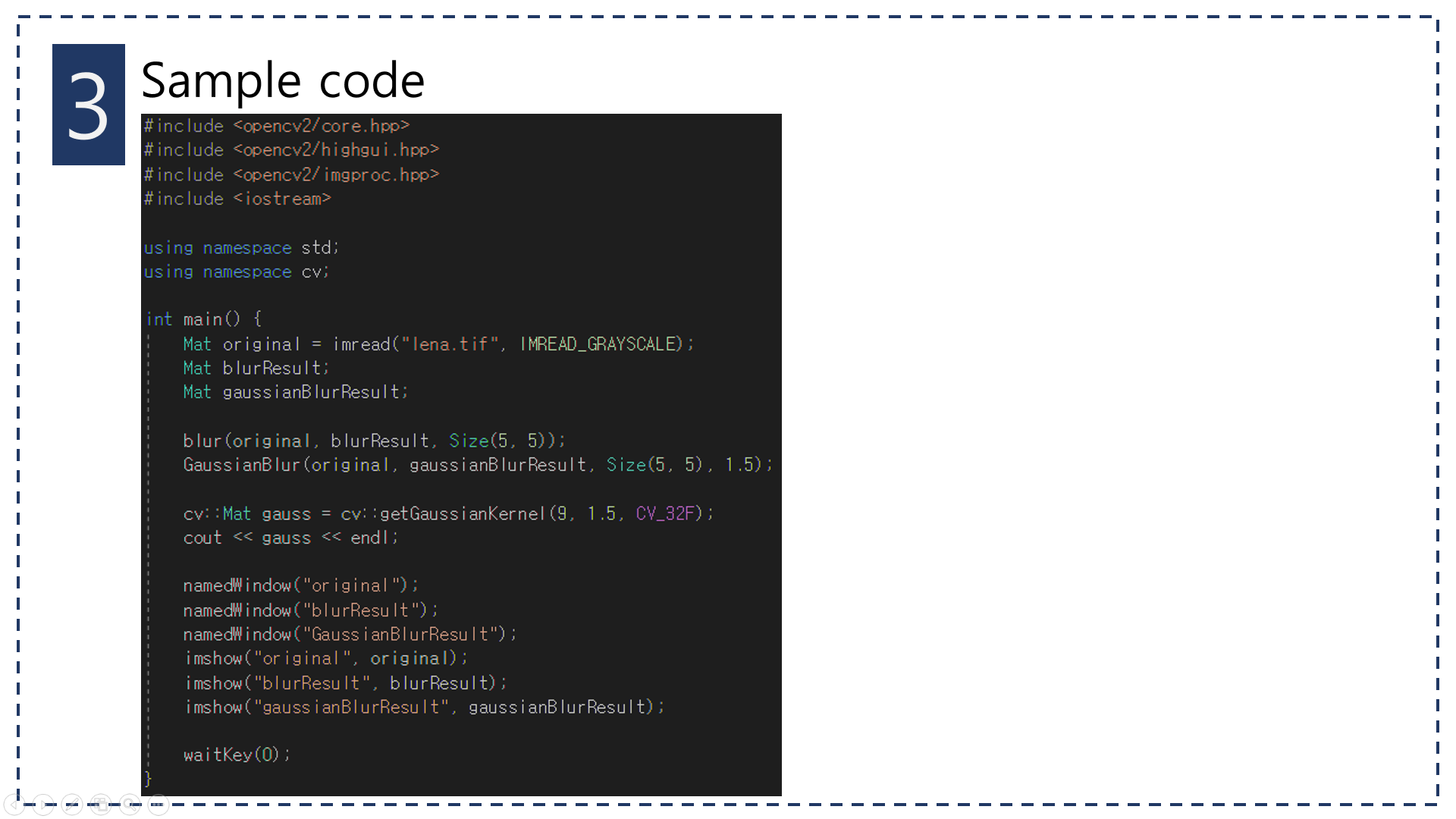
#include <opencv2/core.hpp>
#include <opencv2/highgui.hpp>
#include <opencv2/imgproc.hpp>
#include <iostream>
using namespace std;
using namespace cv;
int main() {
Mat original = imread("lena.tif", IMREAD_GRAYSCALE);
Mat blurResult;
Mat gaussianBlurResult;
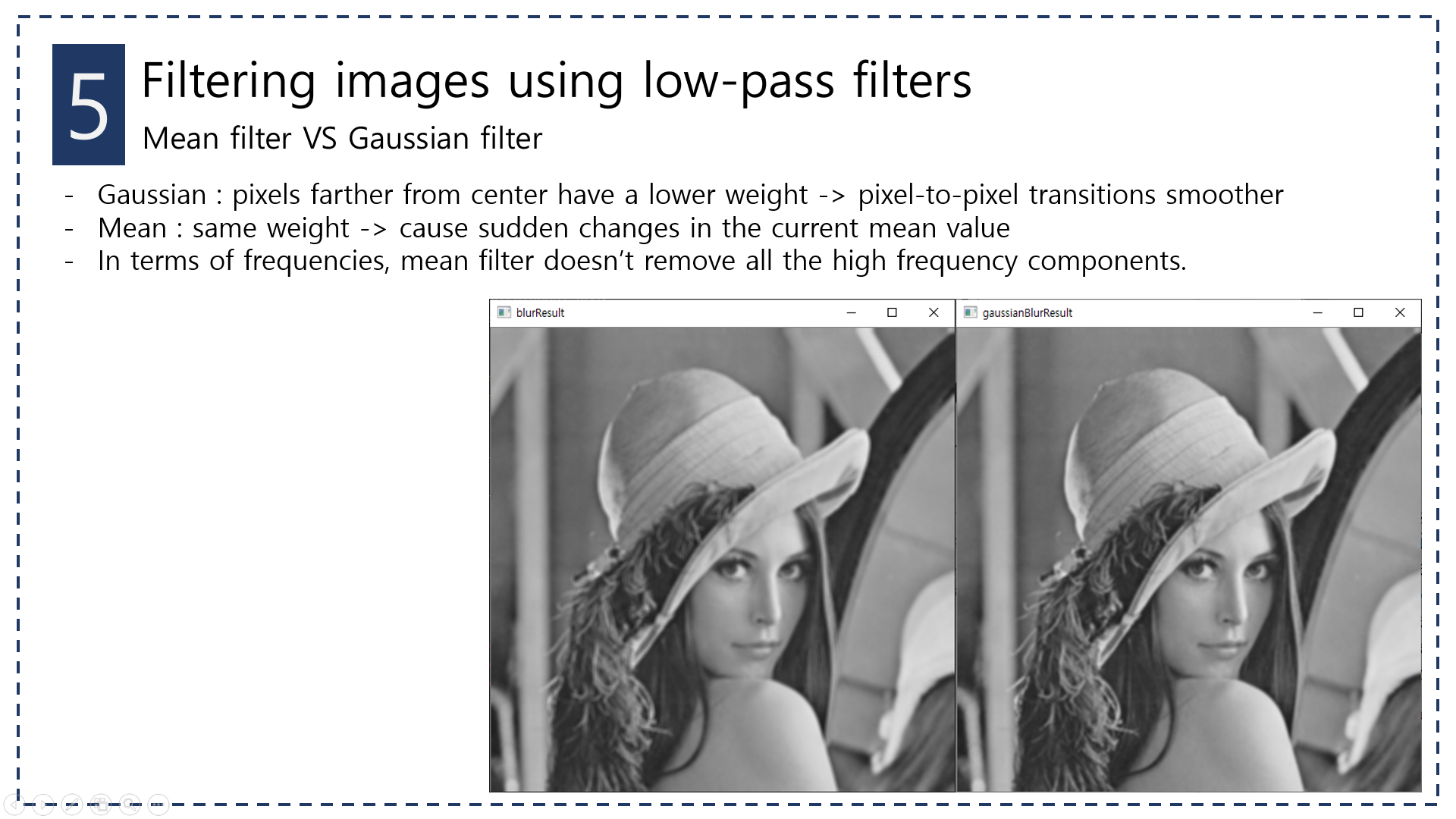
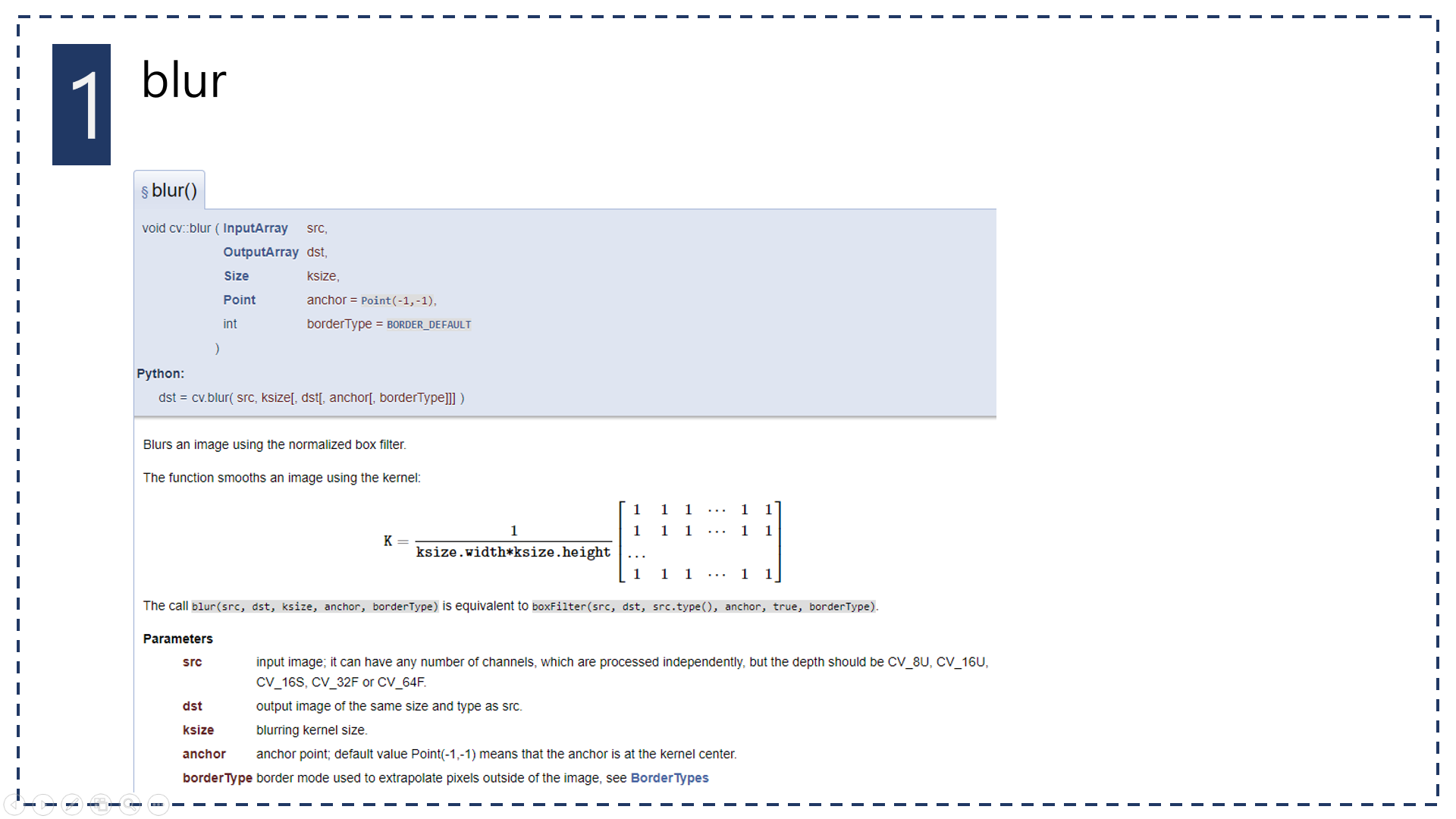
blur(original, blurResult, Size(5, 5));
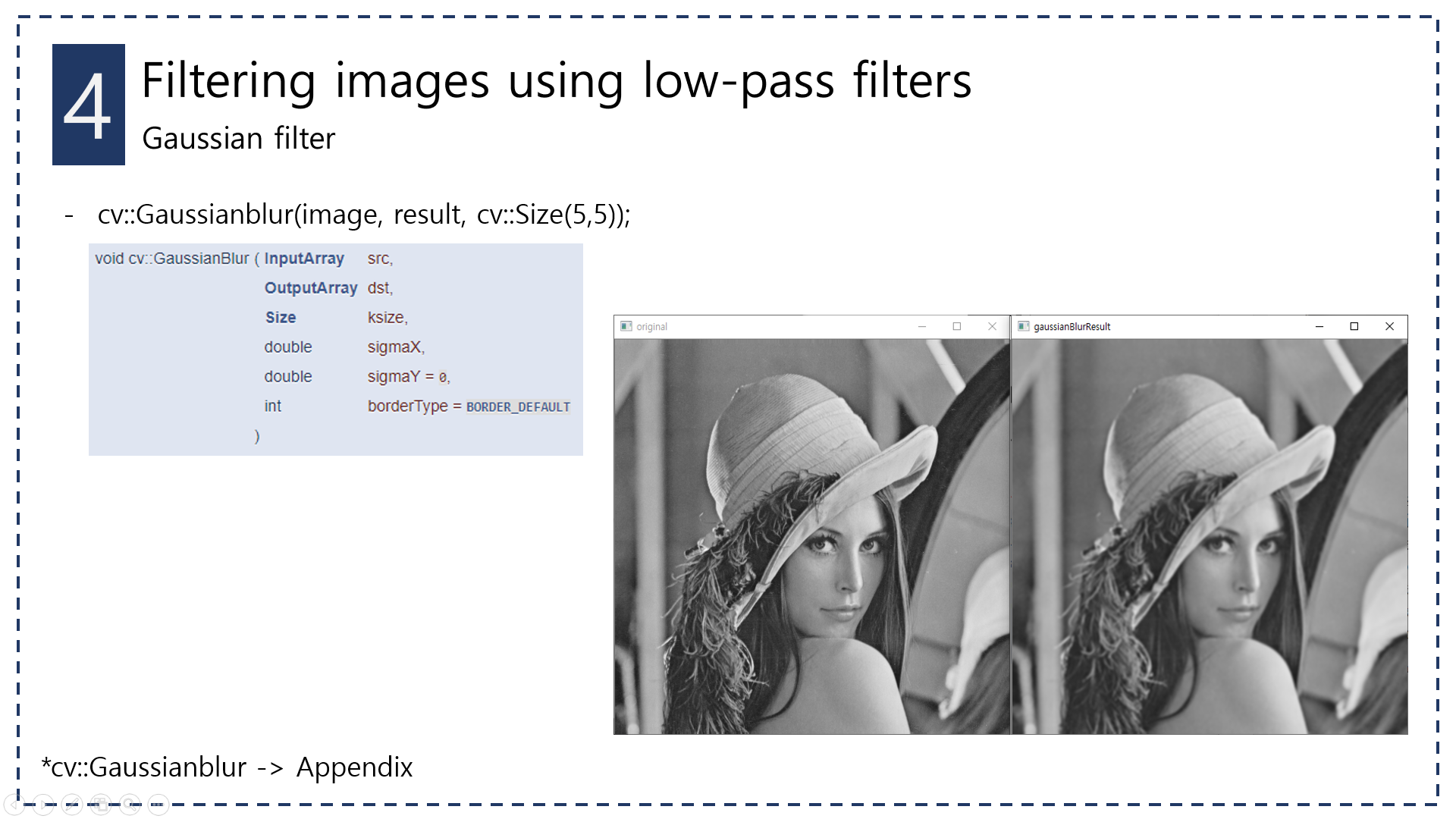
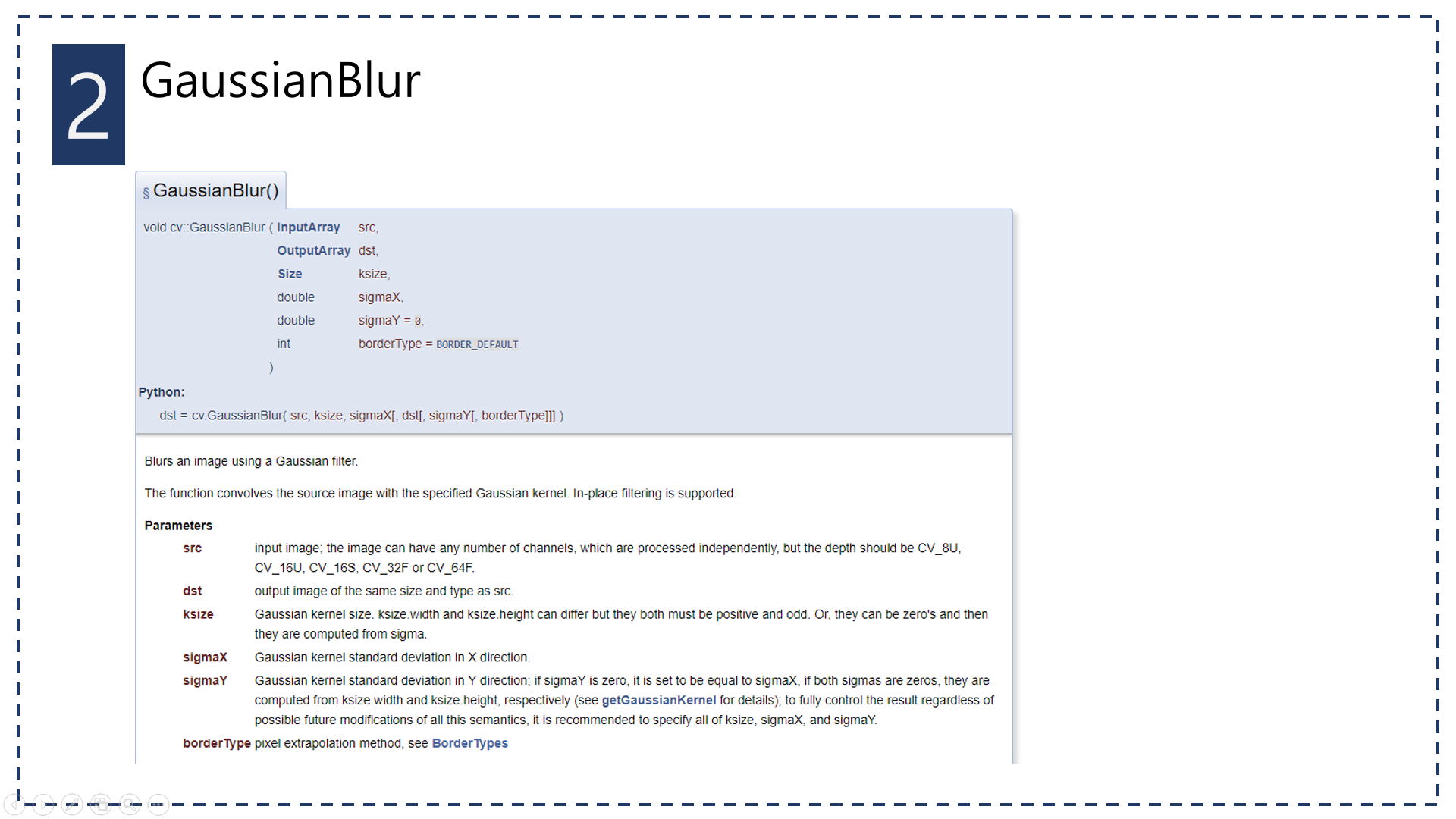
GaussianBlur(original, gaussianBlurResult, Size(5, 5), 1.5);
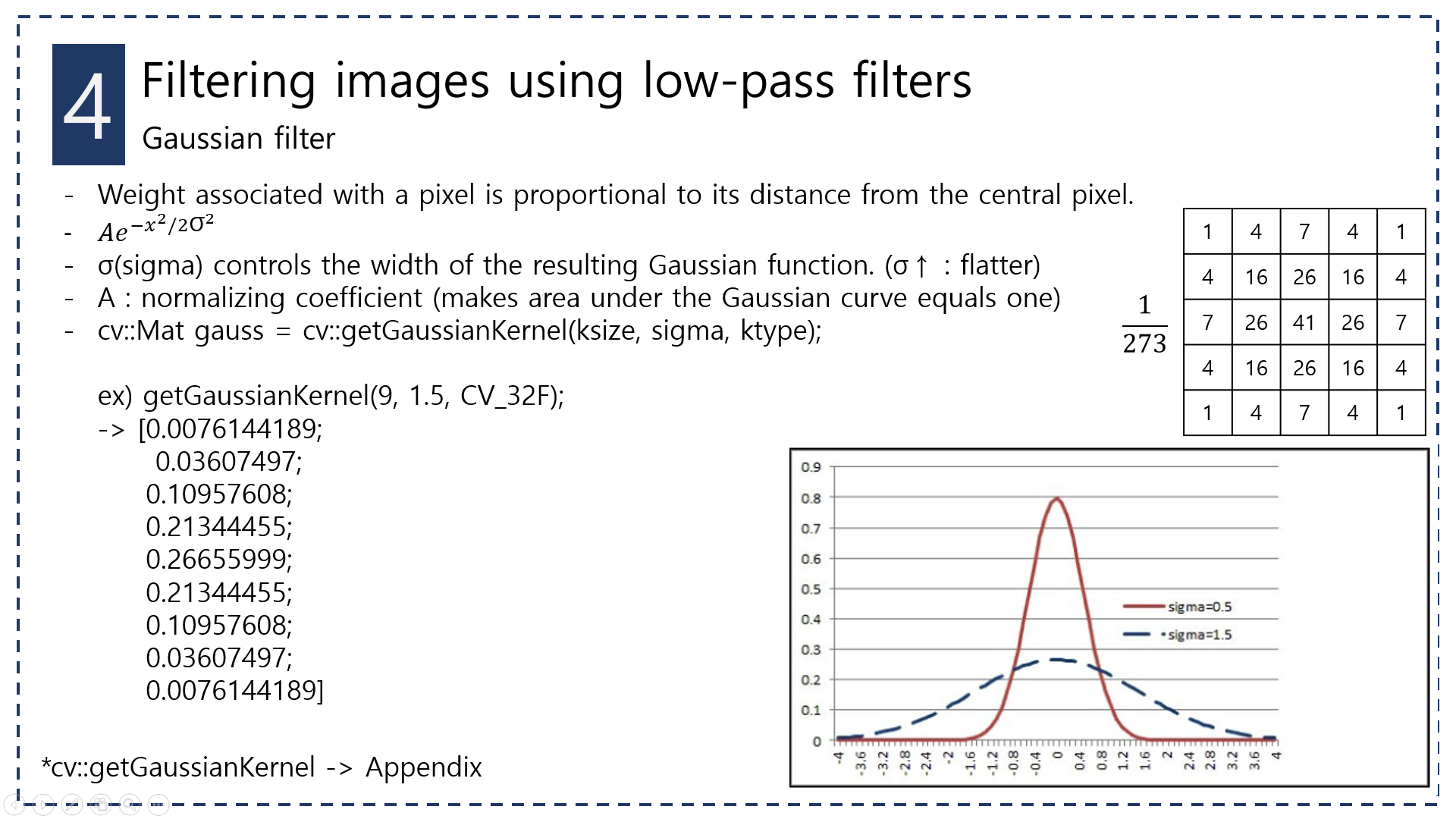
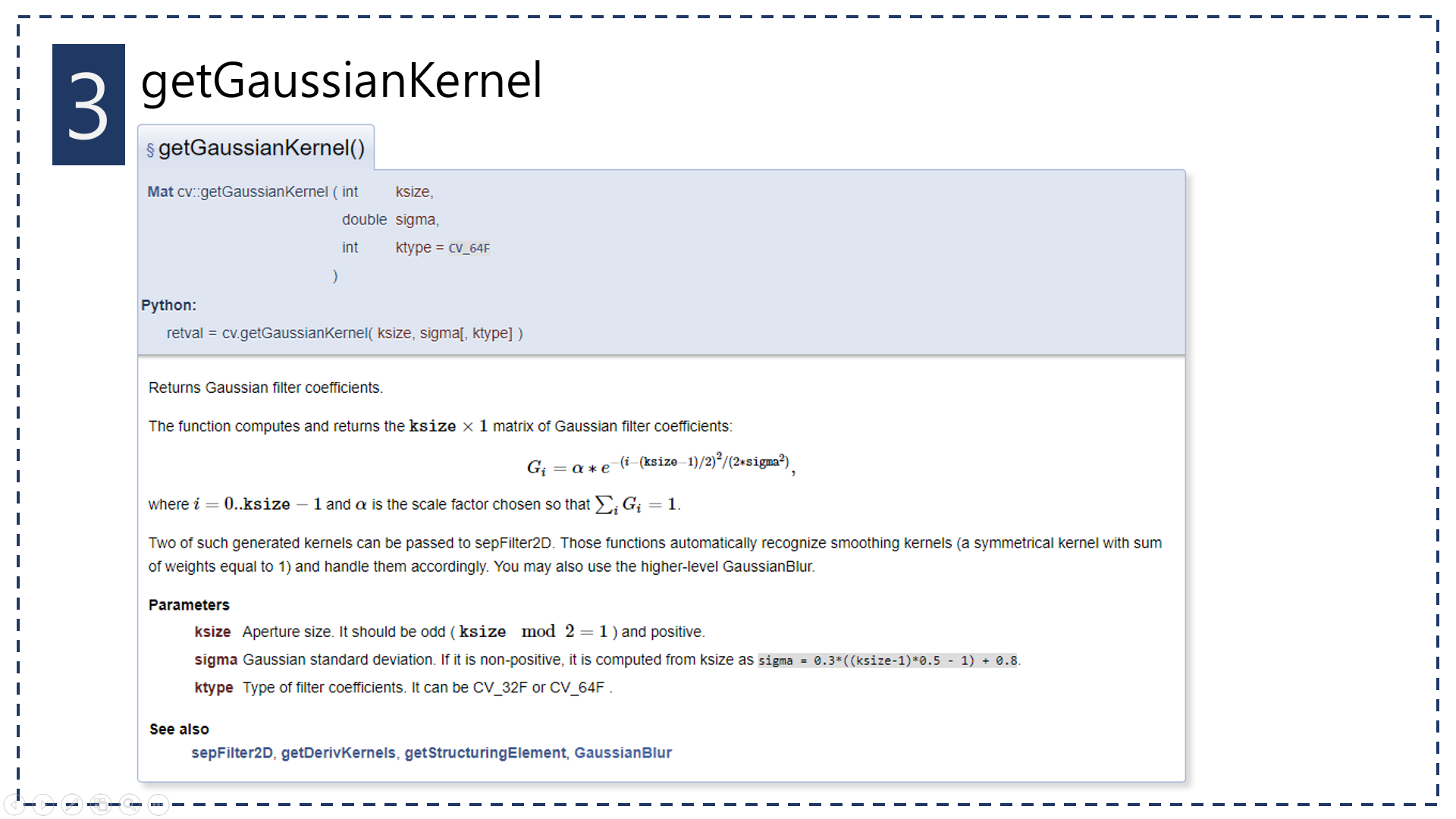
cv::Mat gauss = cv::getGaussianKernel(3, 1.5, CV_32F);
cout << gauss << endl;
namedWindow("original");
namedWindow("blurResult");
namedWindow("GaussianBlurResult");
imshow("original", original);
imshow("blurResult", blurResult);
imshow("gaussianBlurResult", gaussianBlurResult);
waitKey(0);
}
'영상처리 > OpenCV' 카테고리의 다른 글
| 09. Median filter (2) | 2019.04.24 |
|---|---|
| 08. Downsampling (4) | 2019.04.22 |
| 06. Writing efficient scanning loops (0) | 2019.04.16 |
| 05. Scanning with iterator (0) | 2019.04.15 |
| 04.Scanning with pointer (0) | 2019.04.10 |
- Total
- Today
- Yesterday
- 영상처리
- equalizing
- hough transform
- bilateral filter
- direction detection
- Sobel
- OpenCV
- laplacian of gaussian
- gradient
- top hat
- segmentation
- 캐니 엣지
- erosion
- black top hat
- Filter
- median filter
- Low pass filter
- morphology
- mean filter
- pyrUp
- high pass filter
- canny
- Line Detection
- canny operator
- pyrDown
- morphological operation
- dilation
- adaptive thresholding
- difference of gaussian
- upsampling
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | ||||
| 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| 11 | 12 | 13 | 14 | 15 | 16 | 17 |
| 18 | 19 | 20 | 21 | 22 | 23 | 24 |
| 25 | 26 | 27 | 28 | 29 | 30 | 31 |